专利(技术)供应信息
 |
|
专利(技术)介绍
机器人关节启搏器
仿人型机器人的设计制作是从真人体的独特结构的详细分析而来的。就单独一个人体结构来=说,人的活动无论怎样复杂,仔细分析之下就会发现,人体的活动都是在大脑的控制下各个肢体通过关节的往复摆动所形成的。因此,两个相邻肢体的动作只不过是肢节通过关节角度往复摆动装置,然后用程序电路把它们有机协调地连接在一起,所有问题就可以迎刃而解了。鉴于此,本人研制出了一种可以单独运动的往复摆动装置:伺服电机单独带动下的齿轮蜗轮机构—关节启动器,以解决各个关节的单独运动。
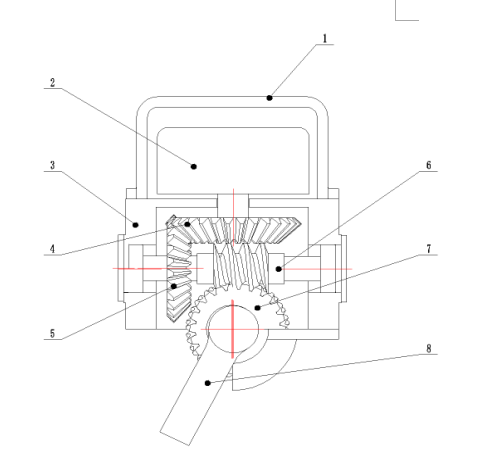
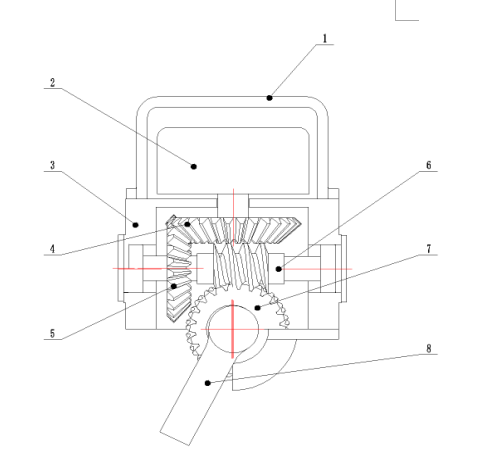
图表 关节启动器 1、电机罩壳;2、伺服电机;3、齿轮箱外壳;4、主动伞齿轮;5、从动伞齿轮;6、蜗杆;7、蜗轮;8、输出摆动架。
关节启动器是以电机罩支架(W1)内装的伺服电机(W2)带动主动伞齿轮(W4),带动从动伞齿轮(W5)和蜗杆(W6),再带动蜗轮W7,以使输出摆动支架(W8)作往复摆动运动,从而获得一个齿轮箱外壳(W3)与输出摆动支架(W8)相互可控的角度变化机构。把这个关节启动器以独立的形式安置在需要关节活动的所有位置上,即可实现仿照人体所需的所有动作要求。 所以采用蜗杆蜗轮装置作往复摆动的构件,原因在于蜗杆蜗轮装置有很好的启动效果,噪音小,且有可靠的自锁能力,即在电机停止运转后,摆动架不致因受外在压力而发生逆转,从而保证有可靠的支撑效果。同时,伺服电机直接带动的蜗杆蜗轮减速装置为获得较为准确的角度值提供了可靠保证。而这在各关节协调活动中是很重要的决定因素。
专利文本:请点击下载查看!
|