
专利(技术)供应信息
 |
|
专利(技术)介绍
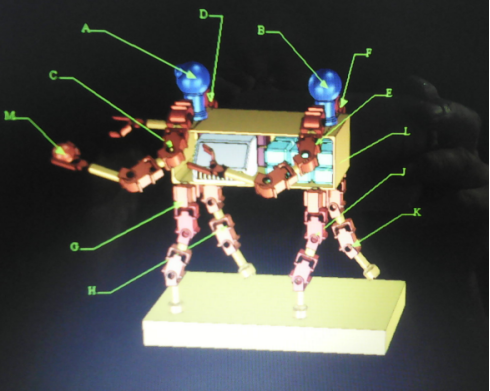
步行式多功能双连机器人功能简介 一、定点取物 : 定点取物是连体机器人的重要功能之一,其步骤是这样的: 1)、首先确定被取目标的空间坐标位置,即通过设头 部的定点扫描仪,确定被取目标的Z(纵坐标)、Y(横坐标)、H(竖坐标)中点 2)、根据自身位置与被取目标位置的方位和距离,确定具体的行走路线; 3)、根据已确定的行走路线,编辑制定具体的执行程序; 4)、根据已确定的执行程序,首先启动脚腿部转向启动器,确定前进方向,并且在行动过程中随时进行调整;然后依次交替启动四条腿的其它关节启动器,通过四条腿的协调运动,以逐渐到达目标物的所在区域; 5)当到达某一个手掌可触及的范围之内,调整手臂的各个关节启动器,即可准确抓取目标物; 6)此后继续手持目标物以到达另一位置,程序是一样的。 定点取物功能的设置,其重要性在于:远距离定点取物的程序控制,为在特定条件下获取所需物品提供程序数字根据;并为在复杂条件下摘取确定物品 (如树上的果实)提供前提条件;并为农作物的收获奠定数字基础。 二、上下台阶: 首先使连体机器人正面面对台阶,再确定台阶的高度、宽度和节数,然后,抬起第一只脚到一定高度,确定落脚点, 踏上第一个台阶,然后伸直腿脚,使身体整个抬起,特色抬起第二只脚,确定第二个台阶的落脚点,继续上台阶,直至走完所有台阶; 上下台阶功能的设置,其优点在于:在有轮子的车无法达到上下台阶的工作,而此双连机器人则可以在程序控制下自由的上下台阶,完成较复杂的移动任务,为在特定区域完成特定任务提供可靠保证。 三、智能农业产业机器人 智能农用产业机器人,由于它的特殊结构,它的行走路线,前进的步幅,跨度,速度,以及步态、作业状态等,都可以通过电脑编程来实现。智能产业农业机器人是以替代农民干活的智慧劳动者的满目出现的,它也为合理安排农业生产和农民的生活提供了足够大的空间。分广阔。 四、消防救灾机器人 在消防救灾现场,最紧急的事情就是消灾救人,同时还要确保救灾人员自身的人身安全。但在现实的消防救灾现场,消防救灾人员为了及时赶赴现场,还必须亲临火场,冒着生命危险实现救援,这就势必造成救灾人员很大的安全隐患,伤亡事故在所难免。面对这一危险局面,消防救灾机器人就可以代替救灾人员赶赴现场,深入火场施行消防救灾,救灾人员不必亲临火场,只在远处安全线以外进行远距离监控操作就可以了。可以有效保护救灾人员的自身安全,又能确保救灾任务的完完成。 五、排雷工兵机器人 在战争期间或战后,为了清除地面或道路上早先埋设的地雷,专门负责这方面工作的工兵就要穿戴上探测排雷设备,亲临现场小心翼翼地仔细探测,然后进行排雷工作。这是一项非常危险的工作,一不小心就会酿成事故,造成人员伤亡。为了避免这一情况发生,排雷工兵机器人就可以代替排雷工兵,亲临排雷现场,进行排雷工任务,排雷人员只需待在远离雷区的安全线以外,进行遥控操作就可以了。 专利文本:请点击下载查看!
|